10.二维计算几何基础
二维计算几何基础
定义向量
const double eps = 1e-10;
struct Point {
double x, y;
Point() {}
Point(double x, double y) : x(x), y(y) {}
};
typedef Point Vector;
Vector operator + (Vector A, Vector B) { return Vector(A.x + B.x, A.y + B.y); }
Vector operator - (Point A, Point B) { return Vector(A.x - B.x, A.y - B.y); }
Vector operator * (Vector A, double p) { return Vector(A.x * p, A.y * p); }
Vector operator / (Vector A, double p) { return Vector(A.x / p, A.y / p); }
int dcmp(double x, double y = 0.0) { // 比较两个浮点数的大小
if (fabs(x - y) < eps) return 0;
return x < y ? -1 : 1;
}
bool operator == (const Point &a, const Point &b) {
return dcmp(a.x, b.x) == 0 && dcmp(a.y, b.y) == 0;
}
基本运算
点积
double dot(Vector A, Vector B) { return A.x * B.x + A.y * B.y; }
长度
double length(Vector A) { return sqrt(dot(A, A)); }
角度
两个向量中的角度可以使用点积计算
double angle(Vector A, Vector B) { return acos(dot(A, B) / length(A) / length(B)); }
叉积
可以使用右手螺旋法则判断正负
double cross(Vector A, Vector B) { return A.x * B.y - A.y * B.x; }
三角形面积
可以利用叉积计算
double area2(Point A, Point B, Point C) { return cross(B - A, C - A); }
向量旋转
Vector rotate(Vector A, double rad) { // 逆时针旋转 rad 弧度
return Vector(A.x * cos(rad) - A.y * sin(rad), A.x * sin(rad) + A.y * cos(rad));
}
求单位法向量
Vector normal (Vector A) { // 左转 90 度, 单位法向量
double L = length(A);
return Vector(-A.y / L, A.x / L);
}
点和直线
直线可以用直线上一点
直线上所有点
参数方程方便的地方在于直线,射线和线段的方程形式是一样的,区别仅仅在于参数
直线的
直线的定义
struct Line {
Point P;
Vector v;
Line() {}
Line(Point P, Vector v) : P(P), v(v) {}
Point point(double t) { return P + v * t; }
}
直线交点
设直线分别为
代码如下,调用前请确保两条直线有唯一交点,当且仅当
Point line_intersection(Point P, Vector v, Point Q, Vector w) {
Vector u = P - Q;
double t = cross(w, u) / cross(v, w);
return P + v * t;
}
Point line_intersection(Line a, Line b) {
Vector u = a.P - b.P;
double t = cross(b.v, u) / cross(a.v, b.v);
return a.point(t);
}
点到直线的距离
用叉积算出,用平行四边形的面积除以底
double distance_to_line(Point P, Point A, Point B) {
Vector v1 = B - A, v2 = P - A;
return fabs(cross(v1, v2) / length(v1));
}
double distance_to_line(Point P, Line l) {
Vector v1 = l.v, v2 = P - l.P;
return fabs(cross(v1, v2) / length(v1));
}
点到线段的距离
点到线段的距离有两种可能
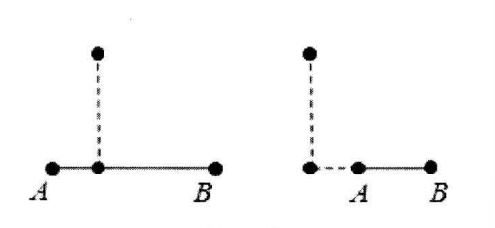
如果投影点为
判断
double distance_to_segment(Point P, Point A, Point B) {
if (A == B) return length(P - A);
Vector v1 = B - A, v2 = P - A, v3 = P - B;
if (dcmp(dot(v1, v2)) < 0) return length(v2);
if (dcmp(dot(v1, v3)) > 0) return length(v3);
return fabs(cross(v1, v2)) / length(v1);
}
点在直线上的投影
我们把直线
Point line_projection(Point P, Point A, Point B) {
Vector v = B - A;
return A + v * (dot(v, P - A) / dot(v, v));
}
线段相交判定
我们定义两条线段相交的充要条件是,每条线段的两个端点都在另一条线段的两侧(叉积的符号不同),不包括在端点处相交(这种方法不能判断在端点处相交)
bool is_segment_proper_intersection(Point a1, Point a2, Point b1, Point b2) {
double c1 = cross(a2 - a1, b1 - a1), c2 = cross(a2 - a1, b2 - a1),
c3 = cross(b2 - b1, a1 - b1), c4 = cross(b2 - b1, a2 - b1);
return dcmp(c1) * dcmp(c2) < 0 && dcmp(c3) * dcmp(c4) < 0;
}
如果允许在端点处相交
- 如果
都是 , 表示两线段共线 - 如果
不都是 ,则只有一种相交方法,即某个端点在另外一条线段上,为了判断上述情况是否发生,还需要如下一段代码判断一个点是否在一条线段上(不包含端点)
bool is_point_on_segment(Point P, Point A, Point B) {
return dcmp(cross(A - P, B - P)) == 0 && dcmp(dot(A - P, B - P)) <= 0; // <= 0 保证端点也算,< 0 不算
}
多边形
把多边形从第一个顶点出发把凸多边形分成
其实这个方法对非凸多边形也适用,因为三角形的面积是有向的,在外面的部分可以抵消掉
多边形面积
double convex_polygon_area(vector<Point> &p) {
int n = p.size();
double area = 0;
for (int i = 1; i < n - 1; i++) area += area2(p[0], p[i], p[i + 1]);
return area / 2;
}
点在多边形内判定
我们定义一个多边形就是二维平面上被一系列首尾相连,闭合的折线段围成的区域,在程序种一般用顶点数组表示,各个点按逆时针顺序排列
有两种方法能判定
第一种是射线法
从某个判定点出发,任意引一条射线,如果和边界相交奇数次,说明在多边形内,如果相交都数次,说明在多边形外。不能再端点处和完整边处相交
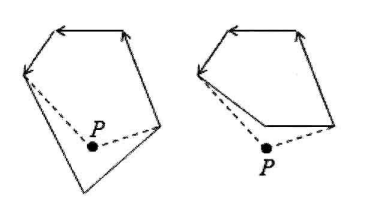
第二种是转角度法
我们把多边形每条边转的角度加起来,如果是 360° 说明再多边形内,如果是 0°,说明再多边形外,如果是 180° 说明在多边形的边界上
一般我们使用第二种方法,直接按照定义去实现需要计算大量的反三角函数,容易产生精度问题。我们一般假象一条向右的射线,统计多边形穿过这条射线正反多少次,把这个记为绕数
bool is_point_in_polygon(Point p, vector<Point> &poly) {
int n = poly.size(), cnt = 0;
for (int i = 0; i < n; i++) {
Point u = poly[i], v = poly[(i + 1) % n];
if (is_point_on_segment(p, u, v)) return true;
double k = cross(v - u, p - u);
double d1 = dcmp(u.y - p.y), d2 = dcmp(v.y - p.y);
if (k > 0 && d1 <= 0 && d2 > 0) cnt++;
if (k < 0 && d2 <= 0 && d1 > 0) cnt--;
}
return cnt != 0; // 0 外部,1 内部
}