10.数论
素数
素数的定义为只能被
素数的判定
小素数时,使用试除法,大素数时使用 Miller_Rabin 算法
欧拉筛
欧拉筛是一种线性筛,它能在
欧拉筛的基本原理,一个合数肯定有一个最小质因数,让每个合数只被它的最小质因数筛一次
- 检查
如果没有被筛过,那么就是素数 - 检查到
的时候,利用已经求的的素数去筛掉对应的合数 ,而且是用 的最小质因数去筛
#include <bits/stdc++.h>
using namespace std;
int main() {
ios::sync_with_stdio(0);
cin.tie(0); cout.tie(0);
int n, q;
cin >> n >> q;
vector<int> p;
vector<bool> vis(n + 1, 0);
for (int i = 2; i <= n; i++ ){
if (!vis[i]) p.push_back(i);
for (int j = 0; j < p.size() && i * p[j] <= n); j++) { // p[j] 就是最小的质因数
vis[i * p[j]] = 1;
if (i % p[j] == 0) break;
}
}
while (q--) {
int x;
cin >> x;
cout << p[x - 1] << '\n';
}
return 0;
}
分解质因数
显然,我们很容易写出
std::vector<int> breakdown(int x) {
std::vector<int> res;
for (int i = 2; i * i <= x; i++) {
if (x % i == 0) {
res.push_back(i);
while (x % i == 0) x /= i;
}
}
if (x != 1)
res.push_back(x);
return res;
}
如果提前打出了素数表,那么时间复杂度为
一元线性同余方程
设
不妨设
这里就转化成了二元线性丢番图方程了
逆元
给定整数
如何求逆
小费马定理求逆元
小费马定理:
如果在两边同时乘
拓展欧几里得求逆元
即解同余方程
拓展欧几里得
裴蜀定理
如果
与 均为整数,则有整数 和 使得
线性丢番图方程
先来看二元线性丢番图方程
设
如果 不能整除 ,那么方程没有整数解,如果 可以整除 ,则方程有无数个整数解
如果存在一个整数解满足
这里可以把
拓展欧几里得算法
我们可以使用拓展欧几里得算法来得到二元线性丢番图方程的一个解
首先我们先考虑解出
基本想法是在辗转相除法中,使用
前者等于
对比系数可得
辗转相除法时,当
ll exgcd(ll a, ll b, ll &x, ll &y) {
if (!b) {
x = 1, y = 0;
return a;
}
LL d = exgcd(b, a % b, x, y), x0 = x, y0 = y;
x = y0, y = x0 - a / b * y0;
return d;
}
此时,我们得到了
积性函数
如果对任意两个互素的正整数
积性函数有一个性质,积性函数的和函数也是积性函数。如果
如果
常见的积性函数
, 单位函数, 幂函数, 原函数 因数和函数, 约数个数,
因为积性函数的性质,我们可以考虑把
理论上来说,也可以使用欧拉筛来求出
欧拉函数
欧拉函数
欧拉反演:
计算
设
用欧拉晒求
通过积性函数的性质
在欧拉筛的时候,
vector<int> get_phi (int n) {
vector<int> phi (n + 1);
vector<bool> vis (n + 1, 0);
vector<int> prime;
for (int i = 2; i <= n; i++) {
if (!vis[i]) {
vis[i] = 1;
prime.push_back(i);
phi[i] = i - 1;
}
for (int j = 0; j < prime.size(); j++) {
if (i * prime[j] > n) break;
vis[i * prime[j]] = 1;
if (i % prime[j] == 0) {
phi[i * prime[j]] = phi[i] * prime[j];
break;
}
phi[i * prime[j]] = phi[i] * phi[prime[j]];
}
}
return phi;
}
莫比乌斯函数
莫比乌斯函数的定义为:
莫比乌斯函数的和函数:
证明:
设
可以看出,当且仅当
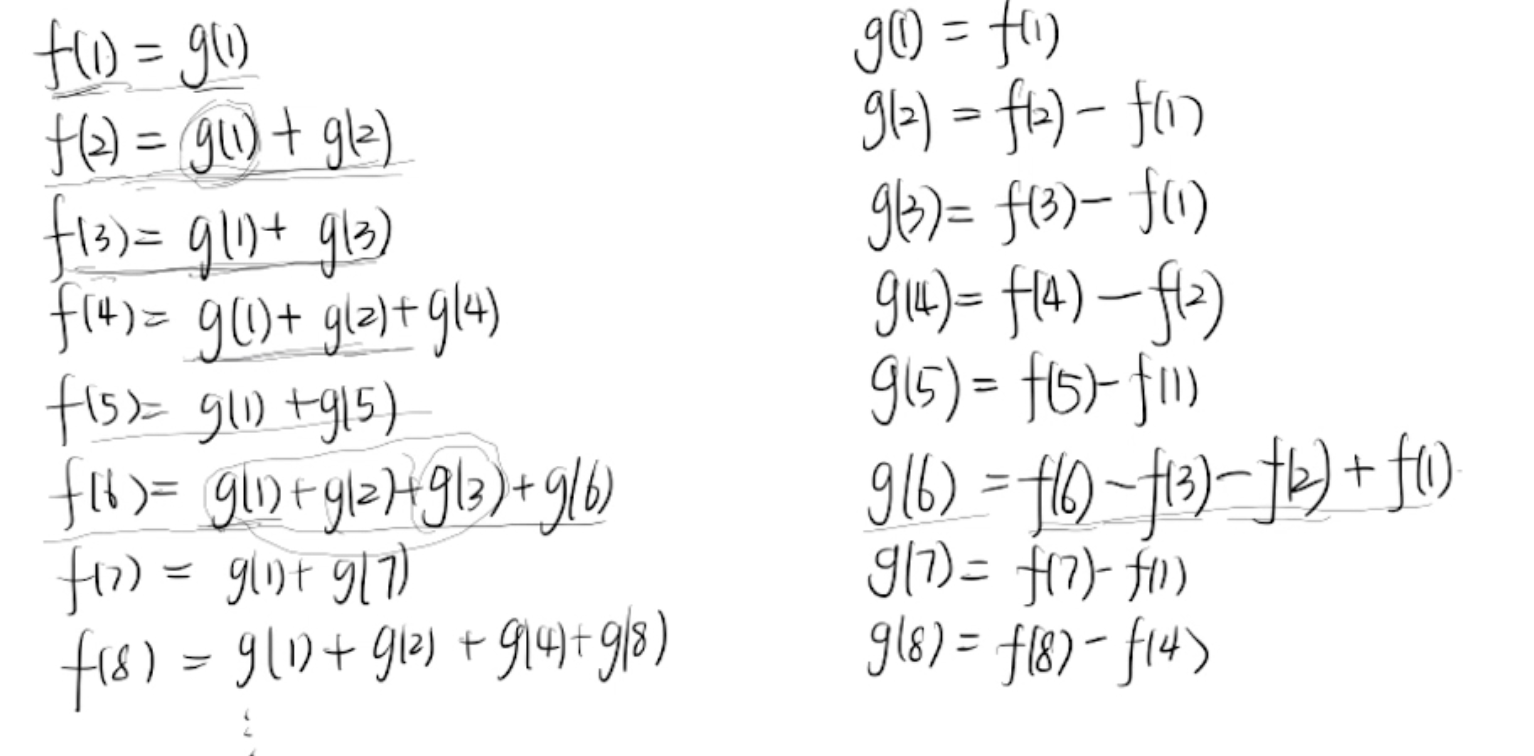
莫比乌斯反演:若
莫比乌斯反演不需要
e.g. 假设
个元组成一个环,每个元都是 中的一个数,两个环不同当且仅当它们不能通过旋转使得两个环中对应的元素都相等,求有多少个这样的环
在现实题目中,比较常用的是莫比乌斯反演的另外一种形式
设
狄利克雷卷积
设
两个积性函数的狄利克雷卷积仍然是积性函数
莫比乌斯反演很容易写成狄利克雷卷积的形式
狄利克雷卷积满足交换律和结合率
考虑一些公式
杜教筛
杜教筛用于在低于线性时间里高效求解一些积性函数的前缀和
设
构造两个积性函数
对
得到
为了计算
式子中
int prime[maxn];
bool vis[maxn];
int mu[maxn];
LL phi[maxn];
unordered_map <int, int> mu_sum;
unordered_map <int, LL> phi_sum;
void init() {
int cnt = 0;
vis[0] = vis[1] = 1;
mu[1] = phi[1] = 1;
for (int i = 2; i < maxn; i++) {
if (!vis[i]) {
prime[cnt++] = i;
mu[i] = -1;
phi[i] = i - 1;
}
for (int j = 0l; j < cnt && i * prime[j] < maxn; j++) {
vis[i * prime[j]] = 1;
if (i % prime[j] == 0) {
mu[i * prime[j]] = 0;
phi[i * prime[j]] = phi[i] * prime[j];
break;
}
mu[i * prime[j]] = -mu[i];
phi[i * prime[j]] = phi[i] * phi[prime[j]];
}
}
for (int i = 1; i < maxn; i++) {
mu[i] += mu[i - 1];
phi[i] += phi[i - 1];
}
}
int g_sum(int x) {
return x;
}
LL get_mu_sum (int x) {
if (x < maxn) return mu[x];
if (mu_sum.count(x)) return mu_sum[x];
LL ret = 1;
for (LL l = 2, r; l <= x; l = r + 1) {
r = x / (x / l);
ret -= 1ll * (r - l + 1) * get_mu_sum(x / l);
}
return mu_sum[x] = ret;
}
LL get_phi_sum (int x) {
if (x < maxn) return phi[x];
if (phi_sum.count(x)) return phi_sum[x];
LL ret = 1ll * x * (x + 1) / 2;
for (LL l = 2, r; l <= x; l = r + 1) {
r = x / (x / l);
ret -= 1ll * (r - l + 1) * get_phi_sum(x / l);
}
return phi_sum[x] = ret;
}
卢卡斯定理
卢卡斯定义用于计算组合数取模,即求
编程时常用的卢卡斯定理的形式:
数论分块
当研究

我们如果能把他们分块一起累计就好了
对于每个块,可以证明
现在考虑如何快速计算
// for(int i = st;i<=ed;i++)ans+=num/i
int block(int st, int ed, int num) {
//sum(num/i i in [st,ed])
int R = 0;
int _ans = 0;
ed = min(ed, num);
for (int L = st; L <= ed; L = R + 1) {
R = min(ed, num / (num / i)); //该区间的最后一个数;
_ans += (R - L + 1)*(num / i); //区间 [L,R] 的 num/i 都是一个值
}
return _ans;
}
来看一道例题
给定两个整数
- 答案对
取模
把取模写成整除的模式
#include <bits/stdc++.h>
using namespace std;
using ll = long long;
const ll MOD = 1e9 + 7;
ll qpow(ll a, ll b, ll mod) {
ll res = 1;
while (b) {
if (b & 1) res = res * a % mod;
a = a * a % mod;
b >>= 1;
}
return res;
}
int main() {
ll n, m; cin >> n >> m;
int inv2 = qpow(2, MOD - 2, MOD);
ll ans = 0;
ll all = n * m % MOD;
m = min(m, n);
for (ll L = 1, R; L <= m; L = R + 1) {
R = min(m, n / (n / L));
ll len = R - L + 1;
ll now = (R + L) % MOD * (R - L + 1) % MOD * inv2 % MOD;
ans = (ans + now * (n / L) % MOD) % MOD;
}
cout << (all - ans + MOD) % MOD << endl;
return 0;
}
威尔逊定理
若
BSGS 大步小歩算法
BSGS 常用于求解离散对数,该算法可以在
其中要求
令
变换一下有
已知 unoreder_map 存下来,然后枚举
枚举
求指标
已知
其中
根据原根的知识:
所以也就是要求